
はじめに
私たちの関わる電気設備である工場やプラントにおいて、コンベアやファン、ポンプなどの大型機械を動かす際、中心となるのは「誘導電動機(モータ)」です。そして、モータを選定する際、多くの人は「定格出力(kW)」や「回転数(min⁻¹)」に目を向けますが、実はそれらと同じくらい、あるいはそれ以上に重要な指標があります。それが「始動時間」です。
「スイッチを入れれば勝手に回るだろう」と安易に考えていると、現場で思わぬトラブルに見舞われることがあります。例えば、始動電流が長く流れすぎてサーマルが動作してそもそも起動が出来なかったり、モータ内部の巻線が熱で焼き切れてしまったりといった事態です。これらを未然に防ぎ、安全かつ効率的な設備運用を行うためには、設計段階で「この負荷を回すのに何秒かかるのか」を正確に算出するスキルが欠かせません。本記事では、始動時間の計算式、慣性モーメント(J)やはずみ車効果(GD)の扱い方、負荷特性の違いについて徹底的に解説します。
なぜ「始動時間」の算出が必要なのか
まず、なぜ始動時間にこだわる必要があるのか、その理由を3つの視点から明確にします。
1. 熱的限界からの保護
誘導電動機はその構造上、回転し始める瞬間に「始動電流(拘束電流)」と呼ばれる非常に大きな電流が流れます。これは定格電流の約6倍から8倍に達します(2014年以降はトップランナモータへの移行が進められ始動電流は8倍以上になることも増えています)。電流が流れると、抵抗によって熱が発生しますが、この熱量は電流の2乗に比例します。つまり、始動時は定格運転時の数十倍のスピードでモータが発熱していることになります。
もし慣性モーメントが大きく、加速に時間がかかりすぎると、モータの絶縁が熱で劣化し、最終的には焼損に至ります。モータには「許容始動時間」という限界値が設定されており、計算値がこれを下回っていることを確認しなければなりません。機械設計者の分野ですね。電気設計者は馴染みがあまりないかもしれません。かく言うT係長も、電気設計方面でしたので、機械出身の人に教えてもらうまでは正直に言えば気にしたことはなかったです。愚かでした。
2. 保護協調が取れなくなる
電気回路には、過電流による火災や故障を防ぐために配線用遮断器(ブレーカ)やサーマルリレーが設置されます。これらの装置は、定格値を超える大きな電流が一定時間以上流れると回路を遮断する特性を持っています。
始動時間の計算を誤り、実際の加速時間が保護装置の動作時間を超えてしまうと、故障でもないのに起動のたびに停電するという「不要動作」が発生し、そもそも「始動できない」という最悪の事態を招きます。誘導電動機は、ダメだったからと言って、すぐに取り換えられるものではありません。数百万円から何千万円単位の損失になってしまいます。
T係長は、想定よりも電動機の始動時間が長くてサーマルが動作してしまい、起動できない事例を経験したことがあります。その時には富士電機製の標準型サーマルから遅動型サーマルに交換することで対応することができました。現在は遅動型サーマルは生産停止となっていますので、オムロンのモータリレーを用いて微調整をするなどの対策が必要になりそうです。後から主回路に関わる配線変更などをするのはとても大変です。設計段階で必ず検討をしておく必要性があります。規格としては、定格電流の200%以上なら 40秒、600%以上なら 6秒 程度で動作することを念頭に置いておくと良いでしょう。下記の記事で詳しく解説しています。

3. 系統や設備全体への影響
大型モータの始動時間は、工場の受変電設備、ひいては他の電気・電子機器にも影響を与えることがあります。実際、電動機の始動時間が長引くと、その間ずっと電圧降下が発生しますので、同じ系統に繋がっている精密機器が誤動作したり、照明がちらついたりする原因となります。これは、構内だけではなく、電力系統側への影響も同様に考慮する必要性があります。短絡容量が小さい系統では、電力会社側から電動機の始動方法に是正を求められることもありますが、これと同じ理屈ですね。一般的には10%以上の電圧降下で電子機器は正常に動作しなくなりますので、この辺りを意識しながら始動方式は考えます。始動時間によって、「数秒だから電圧降下が許容できる」等というのは誤った判断です。始動時間が影響するのは、始動方式をリアクトル始動やコンドルファ始動にした場合の、始動器の「時間定格」を選ぶ場合です。(詳細は後日、別記事にて解説予定)
スポンサーリンク
始動時間を求める基本数式
さて、この記事の本題に入りましょう。始動時間を求めるには、物理学における「回転運動の方程式」をベースにした式を用います。実務では、慣性モーメント(J)を用いる場合とはずみ車効果(\(GD^2\))を用いる場合の2パターンがあります。順に見ていきましょう。どちらでも求められますので、機械メーカから提出される資料に合わせて、楽な方を使用すれば良いでしょう。
慣性モーメント(J)を用いる計算式
慣性モーメント(J)を用いる、国際単位系(SI単位)で一般的に使われる式です。慣性モーメントとは、イナーシャとも呼ばれ(厳密には異なる概念ですが)、物体の回しにくさや止めにくさを表す概念です。慣性モーメントが大きいと、物体の回転数は遅くなります。フィギュアスケートの選手が身体に手足を引き寄せると、回転が速くなり、逆に手や足を広がると回転が遅くなる現象が、分かりやすい例でしょうか。
\( t_s = \displaystyle\frac{(J_M + J_C + J_L) \cdot n }{9.55 \cdot \overline{T}_a} \) [s]
\( t_s \)[s]:始動時間
\( n \)[min-1]:回転速度 ※始動時間を求める場合は全負荷回転数
\( J_M \)[kg・m2]:モータの慣性モーメント
\( J_C \)[kg・m2]:減速機の慣性モーメント
\( J_L \)[kg・m2]:モータ軸に換算した相手機械の慣性モーメント ※後述
はずみ車効果(GD2)を用いる計算式
日本の古い設備や一部の産業機械で今なお根強く使われている単位系です。T係長の現場でも、よく提示されるのはこちらの情報です。意味合い的には慣性モーメントと同様です。
\( t_s = \displaystyle\frac{(GD^2_M + GD^2_C + GD^2_L) \cdot n}{375 \cdot \overline{T}_a} \) [s]
\( t_s \)[s]:始動時間
\( n \)[min-1]:回転速度 ※始動時間を求める場合は全負荷回転数
\( GD^2_M \)[kgf・m2]:モータの慣性モーメント
\( GD^2_C \)[kgf・m2]:減速機の慣性モーメント
\( GD^2_L \)[kgf・m2]:モータ軸に換算した相手機械の慣性モーメント ※後述
慣性モーメントの合算と「軸換算」の罠
計算式において最もミスが発生しやすいのが、慣性モーメント(J)や、はずみ車効果の合算作業です。
手順1:構成要素をすべて拾い出す
始動時には、モータのロータ(回転子)だけでなく、軸に繋がっているすべての物体を加速させる必要があります。
- モータ自身: カタログに必ず記載されています。ブレーキ付きの場合はブレーキディスクの分も含まれているか確認が必要です。ブレーキ付きの場合には、慣性モーメントやはずみ車効果は大きくなるので、始動時間も当然に長くなってしまいます。
- 減速機: モータと負荷の間に入るギアボックスの慣性です。これもカタログ値を使用します。もちろん、水中ポンプなどモータの回転軸と羽根車(インペラ)が一本のシャフトで直接つながっている「直結構造」の場合には減速比は 1:1 です。
- モータ軸に換算した相手機械: 軸を繋ぐカップリングやプーリなどの部品の慣性も無視できません。これも基本的にカタログ値を採用します。
手順2:減速比によるモータ軸換算
ここが最重要ポイントです。負荷側が減速機を介してゆっくり回っている場合、そのJをそのまま足してはいけません。モータ軸から見た負荷の慣性は、減速比の「2乗」で小さくなります。減速比を \(1/Z \)(モータがZ回転する間に負荷が1回転する)とすると、換算式は以下の通りです。
\( J_L (\text{換算後}) = J_L (\text{負荷実値}) \times \left( \displaystyle\frac{1}{Z} \right)^2 \)
例えば減速比が1/10であれば、負荷側はモータ軸から見ると1/100の重さにしか感じられません。逆に言えば、減速機を使うことで、小さなモータでも巨大な慣性体を引き回すことが可能になるのです。
平均加速トルク(Ta)の導き方
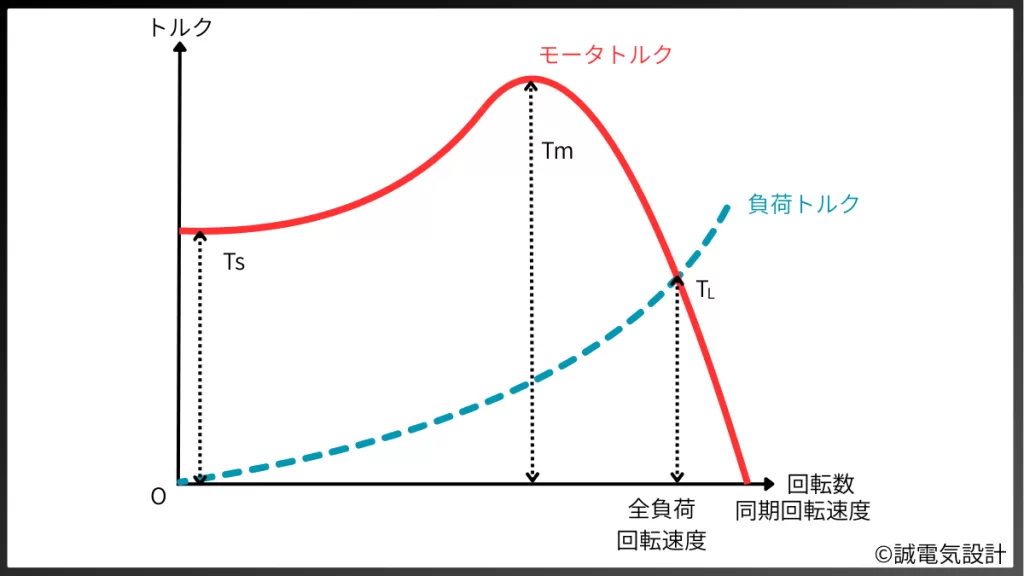
分母にくる「平均加速トルク」は、単なるモータの能力ではありません。「モータが頑張る力」から「負荷が邪魔する力」を引いた「余力」の平均値です。求めるためには、モータトルク曲線と負荷トルク曲線が必要になるだけではなく、正確な算出には高度な微積分の知識が必要です。もちろん、実務ではそこまでのことはできません。全電圧始動時の平均加速トルク\( $\overline{T}_a \)は、下記の概略計算を用いるのが一般的です。単位は慣性モーメントを用いる場合には[N・m]、はずみ車効果を用いる場合には[kgf・m]でそろえてください。
\( \overline{T}_a = 0.8 \times \left( \displaystyle\frac{T_s + T_m}{2} \right) – \overline{T}_L \)
\( T_s \):始動トルク
\( T_m \):最大トルク(停動トルク)
\( \overline{T}_L \):始動中の平均負荷トルク 後述
上記を特性曲線上の値と結び付けることが大切です。下図を合わせてご覧ください。
平均負荷トルク(TL)の導き方
平均負荷トルク(\( $\overline{T}_L \))は、負荷の種類によって全く異なる挙動を示します。これを理解せずに計算はできません。「定トルク負荷」か「二乗低減トルク負荷」に分類されるかを正しく理解しましょう。
定トルク負荷(摩擦負荷型)は、コンベアや昇降機、往復動コンプレッサなどが該当します。この負荷の大きな特徴は、回転速度の変化に関わらず常に一定の抵抗がかかり続ける点にあります。始動時間への影響については、動き出しの瞬間から定格速度に達するまで終始重い負荷がかかるため、加速に回せるトルク、いわゆる加速トルクの余力を確保しにくくなります。その結果として、他の負荷形式と比較して始動時間は長くなる傾向が見られます。
なお、計算等に用いる平均負荷トルクの選定においては、定格トルクの値をそのまま採用するか、あるいは実測に基づいた数値を用いるのが一般的です。
定トルク負荷の平均負荷トルク:\( \overline{T}_L = T_L \)
一方で、二乗低減トルク負荷は、ファン、ポンプ、ブロワといった流体機械が該当します。定トルク負荷が常に一定の抵抗を持つのに対し、こちらは回転速度の二乗に比例して負荷トルクが増加していくという大きな違いがあります。
始動時の挙動に注目すると、低速域では負荷が非常に小さいため、加速のための余力である加速トルクを十分に確保しやすいのがメリットです。そのため、定トルク負荷と比較するとスムーズに立ち上がり、始動時間を短縮しやすくなります。一方で、定格速度に近づくにつれて負荷が急激に重くなるため、最終的な到達点でのトルク管理が重要になります。
平均負荷トルクの算出においても、常に一定値を用いる定トルク負荷とは異なり、下記の概算式で対応します。
二乗低減トルク負荷の平均負荷トルク:\( \overline{T}_L = 0.34T_L \)
スポンサーリンク
おわりに
これまで解説してきた通り、モータの始動時間は単なる「動き出すまでの待ち時間」ではありません。それは、モータの寿命を左右する熱的限界との戦いであり、遮断器やサーマルリレーとの緻密な保護協調そのものです。
「定格出力が足りているから大丈夫」という思い込みは、現場での不要動作や焼損事故を招くリスクを孕んでいます。慣性モーメントの正確な把握、減速比による軸換算、そして負荷特性(定トルクか二乗低減か)に応じた平均加速トルクの算出。これら一つひとつのステップを丁寧に行うことで、初めて安全で信頼性の高い設備設計が可能になります。
電気設計と機械設計の知見が交差するこの「始動時間」の検討をマスターすれば、トラブルを未然に防ぐだけでなく、最適な始動方式の選定やコストダウンにも自信を持って取り組めるはずです。本記事の数式や考え方を、ぜひ日々の実務に役立ててください。
